坐标变换与矢量旋转
在多体动力学建模中,通常会建立多个坐标系,其中会涉及大量的坐标变换。坐标变换是由于参考系的姿态差异导致,因此与旋转存在联系。本文旨在讨论坐标变换与旋转之间的数学关系与区别,并推导坐标变换矩阵的动力学特性。
矢量的坐标表示
有大小和方向的物理量称为矢量(Vector),通常用带箭头的符号表示,如 $\vec{r}$。为了定量描述与计算,需要选定基矢构成参考系,利用矢量合成原理进行表述。如下图所示,参考系 $\mathscr{A} = \{O,\,\vec{a}_1,\,\vec{a}_2 \}$ 以 $O$ 为原点,$\vec{a}_1$ 和 $\vec{a}_2$ 为基矢。任意矢量 $\vec{r}$ 可以写作
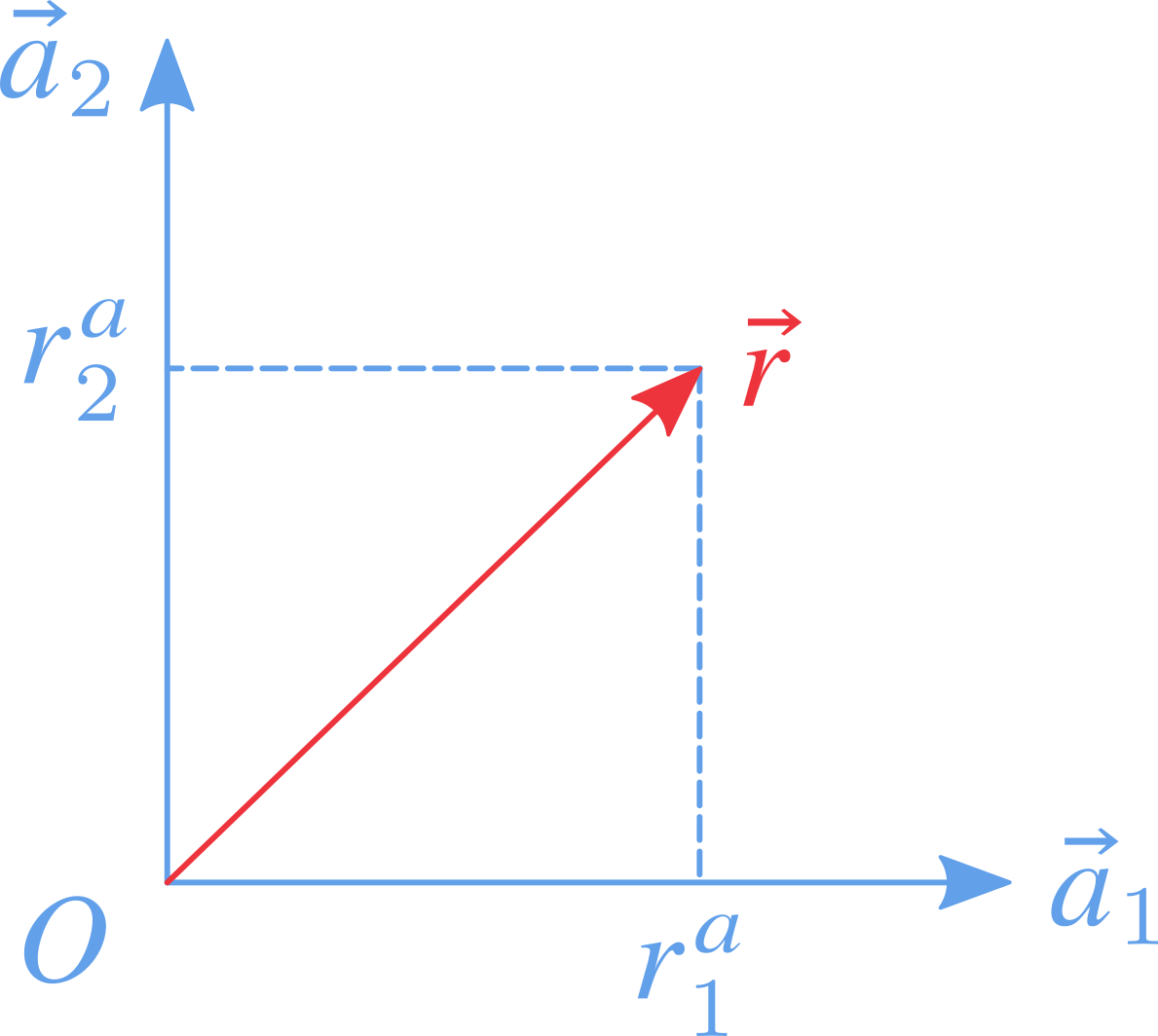
这里我们使用带箭头的大写字母表示参考系基矢构成的行向量,即 $\vec{A} = [\vec{a}_1, \vec{a}_2]$;选定基矢后,基矢的组合系数构成列向量,为矢量的坐标(Coordinate),用加粗的字母表示,并将参考系标记在上标的位置,本例中为 $\bm{r}^a= [r_1^a, r_2^a]^\mathrm{T}$。在此记号下,我们可以使用矩阵的计算方法将适量表示为基矢与坐标的组合,即上式最后的等号。在后文的推导中,我们将使用更一般的三维形式,而为了方便理解,示意图保持为二维形式。
如无特别说明,参考系的基矢通常选为单位正交基,其点积满足
$$ \vec{A}^\mathrm{T} \cdot \vec{A} = \begin{bmatrix} \vec{a}_1 \\ \vec{a}_2 \\ \vec{a}_3 \end{bmatrix} \cdot \begin{bmatrix} \vec{a}_1 & \vec{a}_2 & \vec{a}_3 \end{bmatrix} = \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} = I_{3 \times 3} $$由此我们可以获知坐标的计算方法:
$$ \bm{r}^a = I_{3 \times 3} \bm{r}^a = \left( \vec{A}^\mathrm{T} \cdot \vec{A} \right) \bm{r}^a = \vec{A}^\mathrm{T} \cdot \left( \vec{A} \bm{r}^a \right) = \vec{A}^\mathrm{T} \cdot \vec{r} = \begin{bmatrix} \vec{a}_1 \cdot \vec{r} \\ \vec{a}_2 \cdot \vec{r} \\ \vec{a}_3 \cdot \vec{r} \\ \end{bmatrix} $$上式指出,为了获取矢量在给定参考系下的坐标,只需计算矢量与参考各基矢之间的点积即可,即:坐标是矢量在基矢方向的投影。
坐标变换
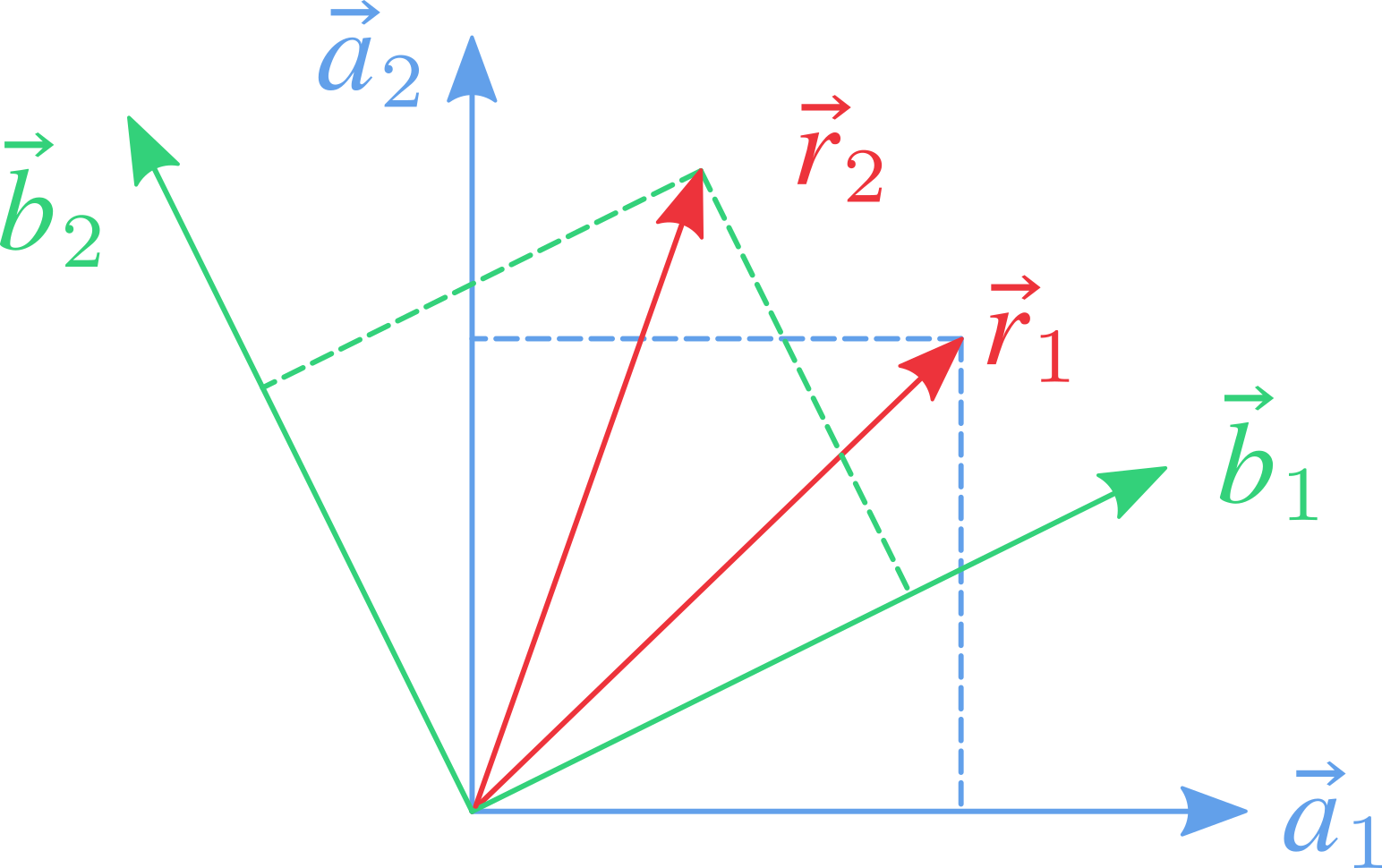
选取的参考系不同,相同矢量的坐标不同。参考系之间的平移可以简单地通过矢量加法实现,因此这里的坐标变换重点关注参考系之间的转动,设它们的原点重合(因此后文直接用基矢表示各参考系),如下图所示。
矢量 $\vec{r}$ 可以在两个参考系中分别表述为
$$ \vec{r} = \vec{A} \bm{r}^a = \vec{B} \bm{r}^b $$考察坐标之间的关系,不难得到
$$ \bm{r}^b = \vec{B} \cdot \vec{r} = \vec{B}^\mathrm{T} \cdot \left( \vec{A} \bm{r}^a \right) = \left( \vec{B}^\mathrm{T} \cdot \vec{A} \right) \bm{r}^a = R_a^b \bm{r}^a $$其中 $R_a^b$ 为坐标变换矩阵,其表示从参考系 $\vec{A}$ 到参考系 $\vec{B}$ 的坐标变换(从下往上读)。从上式的两端可以发现,在这种表述方式下,角标形式上具有“相互抵消”的性质,即:如果左侧变量的下标与右侧变量的上标相同,则抵消两个角标并根据左侧变量的上标替换掉右侧变量的上标。后面讨论的连续坐标变换能够充分体现这种特性。
坐标变换矩阵 $R_a^b$ 具体展开为
$$ \begin{aligned} R_a^b &= \begin{bmatrix} \vec{B}^\mathrm{T} \cdot \vec{a}_1 & \vec{B}^\mathrm{T} \cdot \vec{a}_2 & \vec{B}^\mathrm{T} \cdot \vec{a}_3 \end{bmatrix} = \begin{bmatrix} \bm{a}_1^b & \bm{a}_2^b & \bm{a}_2^b \end{bmatrix} \\ &= \begin{bmatrix} \vec{b}_1 \cdot \vec{A} \\ \vec{b}_2 \cdot \vec{A} \\ \vec{b}_3 \cdot \vec{A} \\ \end{bmatrix} = \begin{bmatrix} \left(\bm{b}_1^a\right)^\mathrm{T} \\ \left(\bm{b}_2^a\right)^\mathrm{T} \\ \left(\bm{b}_3^a\right)^\mathrm{T} \end{bmatrix} \end{aligned} $$上式中,第一行说明坐标变换矩阵可以按列解释:每一列分别由参考系 $\vec{A}$ 的各基矢在参考系 $\vec{B}$ 中的坐标组成;第二行说明该矩阵也可以按行解释:每一行为参考系 $\vec{B}$ 的各基矢在参考系 $\vec{A}$ 中的坐标(的转制)组成 。我们通常倾向于按列解释,这样可以保持上标的一致性。由于单位向量的点积等于夹角的余弦,因此坐标变换矩阵也称作方向余弦矩阵(DCM, Direction Cosine Matrix)。
考虑矢量 $\vec{r}$ 按照 $\vec{A} \rightarrow \vec{B}_1 \rightarrow \vec{B}_2 \rightarrow \cdots \rightarrow \vec{B}_n$ 的顺序进行 $n$ 次坐标变换,有
$$ \bm{r}^{b_n} = R_{b_{n-1}}^{b_n} \bm{r}^{b_{n-1}} = R_{b_{n-1}}^b \left( R_{b_{n-2}}^{b_{n-1}}\bm{r}^{b_{n-2}} \right) = \cdots = \left( R_{b_{n-1}}^b R_{b_{n-2}}^{b_{n-1}} \cdots R_a^{b_{1}} \right) \bm{r}^a $$即
$$ R_a^{b_n} = R_{b_{n-1}}^{b_n} R_{b_{n-2}}^{b_{n-1}} \cdots R_a^{b_{1}} $$说明连续坐标变换矩阵为各坐标变换矩阵按顺序左乘的结果。
最后,我们重新将坐标变换矩阵代回到矢量表达式中,得
$$ \vec{r} = \vec{A} \bm{r}^a = \vec{B} \bm{r}^b = \vec{B} R_a^b \bm{r}^a \quad \Rightarrow \quad \vec{A} = \vec{B} R_a^b $$最后的等号暗示了坐标系之间的关系,将在后文矢量旋转那里做进一步说明。利用基矢的正交性,有
$$ I_{3 \times 3} = \vec{A}^\mathrm{T} \cdot \vec{A} = \left( \vec{B} R_a^b \right)^\mathrm{T} \cdot \left( \vec{B} R_a^b \right) = \left(R_a^b \right)^\mathrm{T} \left(\vec{B}^\mathrm{T} \cdot \vec{B}\right) R_a^b = \left(R_a^b \right)^\mathrm{T} R_a^b $$这说明坐标变换矩阵 $R_a^b$ 为正交矩阵,即 $\left(R_a^b \right)^{-1} = \left(R_a^b \right)^\mathrm{T}$。我们可以令 $R_b^a = \left(R_a^b \right)^{-1}$,则 $R_a^b R_b^a = R_b^a R_a^b = I$ 意味着来回变换之后坐标保持不变(这里可以再次看到角标之间的“抵消”性质)。
矢量旋转
将目光限定在参考系 $\vec{A}$ 中,现在将矢量 $\vec{r}_1$ 进行一定的旋转,得到 $\vec{r}_2$ ,如何得到它们坐标 $\bm{r}_1^a$ 和 $\bm{r}_2^a$ 之间的关系?
考虑 $\vec{r}_1$ 连同参考系(的基矢) $\vec{A}$ 一起旋转,当 $\vec{r}_1$ 转到 $\vec{r}_2$ 的位置时 $\vec{A}$ 相应地变成 $\vec{B}$。由于是一起旋转,相对关系保持不变,即 $\vec{r}_2$ 在 $\vec{B}$ 的坐标等于 $\vec{r}_1$ 在 $\vec{A}$ 的坐标,即 $\bm{r}_2^b = \bm{r}_1^a$,考虑到坐标变换有 $\bm{r}_2^a = R_b^a \bm{r}_2^b$,可以得到
$$ \bm{r}_2^a = R_b^a \bm{r}_1^a $$这就说明,坐标变换矩阵同时具有旋转的含义,也可称之为旋转矩阵, $R_b^a$ 表示从参考系 $\vec{A}$ 到参考系 $\vec{B}$ 的旋转(从上往下读,注意这里交换了角标)。
在对实际物体旋转的描述中,通常使用本体坐标系之间的关系。在上文我们实际上已经得到了 $\vec{A} = \vec{B} R_a^b$,这同样可以“从上往下”地解读为 $\vec{B}$ 旋转到 $\vec{A}$。
考虑参考系 $\vec{r}$ 按照 $\vec{A} \rightarrow \vec{B}_1 \rightarrow \vec{B}_2 \rightarrow \cdots \rightarrow \vec{B}_n$ 的顺序进行 $n$ 次旋转,有
$$ \vec{B}_n = \vec{B}_{n-1} R_{b_{n}}^{b_{n-1}} = \vec{B}_{n-2} R_{b_{n-1}}^{b_{n-2}} R_{b_{n}}^{b_{n-1}} = \cdots = \vec{A} R_{b_1}^a \cdots R_{b_{n-1}}^{b_{n-2}} R_{b_{n}}^{b_{n-1}} $$即 $\vec{A}$ 到 $\vec{B}_n$ 的连续旋转结果为
$$ R_{b_n}^a = R_{b_1}^a R_{b_2}^{b_1} \cdots R_{b_{n}}^{b_{n-1}} $$最终的旋转矩阵 $R_b^a$ 为各次旋转矩阵按顺序右乘的结果。
转动的描述
最后我们来看一下坐标变换矩阵(或者说转动矩阵)的运动学特性。首先如下图所示,假设参考系 $\vec{B}$ (通常为刚体的本体参考系)的角速度为 $\bm{\omega}_b^b = [\omega_1,\omega_2,\omega_3]^\mathrm{T}$(注意角速度都是在本体坐标系下建立的,各分量省略了上标),以基矢 $\vec{b}_1$ 为例,在 $\mathrm{d}t$ 时间内其变化量为
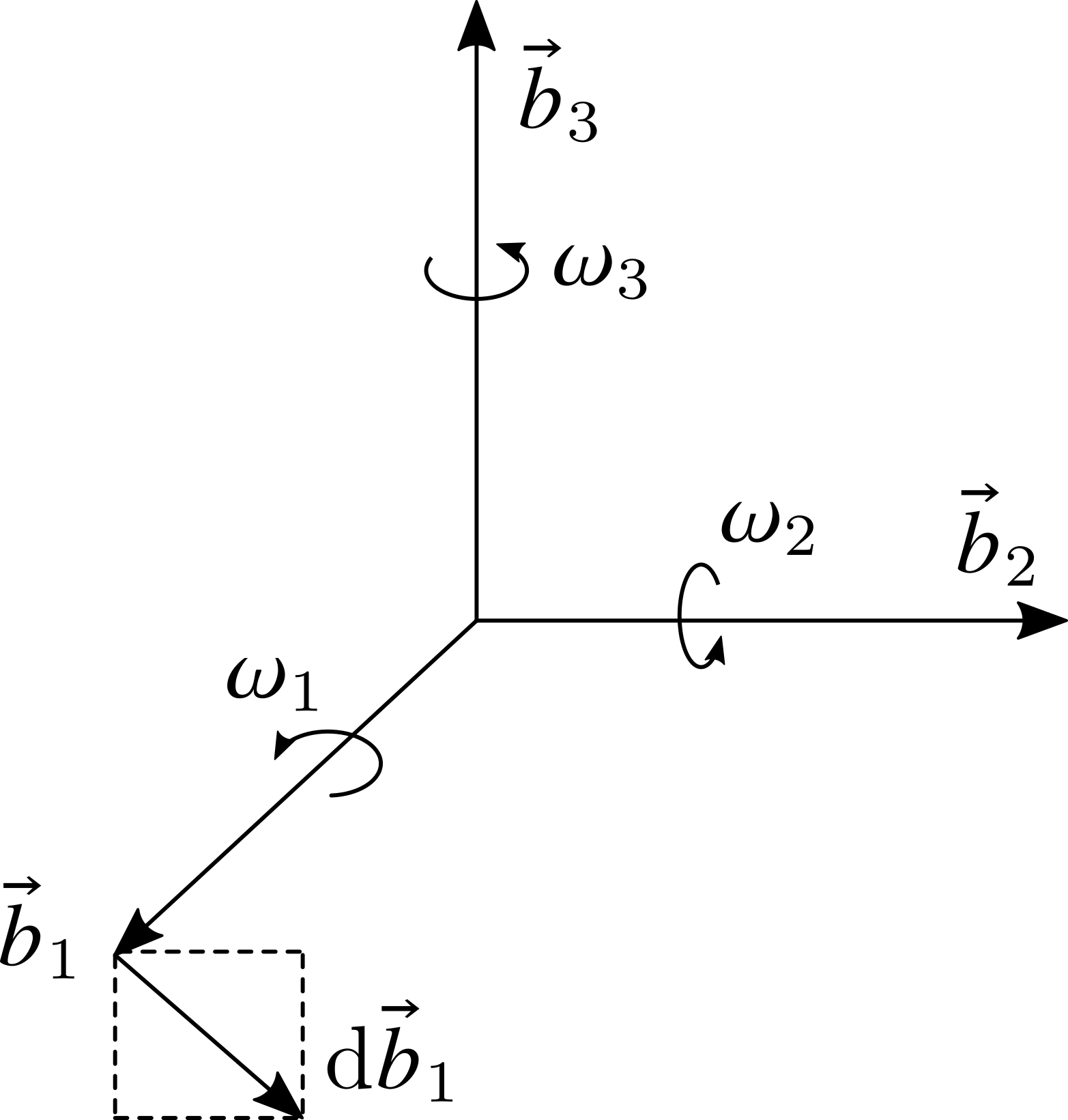
类似地,将三个基矢的导数整理为
$$ \begin{aligned} \dot{\vec{B}} &= \begin{bmatrix} \omega_3 \vec{b}_2 -\omega_2 \vec{b}_3 & -\omega_3 \vec{b}_1 + \omega_1 \vec{b}_3 & \omega_2 \vec{b}_1 - \omega_1 \vec{b}_2 \end{bmatrix} \\ &= \begin{bmatrix} \vec{b}_1 & \vec{b}_2 & \vec{b}_3 \end{bmatrix} \begin{bmatrix} 0 & -\omega_3 & \omega_2 \\ \omega_3 & 0 & -\omega_1 \\ -\omega_2 & \omega_1 & 0 \end{bmatrix} \\ &= \vec{B} \bm{\omega}_b^b \times \end{aligned} $$我们将上式最后的 $3 \times 3$ 矩阵记做 $\bm{\omega}_b^b \times$,这样的表述与矢量的叉乘一致,且 $(\bm{\omega}_b^b \times)^\mathrm{T} = -\bm{\omega}_b^b \times$ 为反对称矩阵。最后,我们考察任意参考系 $\vec{A}$ 向本体系 $\vec{B}$ 的转动矩阵 $R_b^a$ 的导数,得
$$ \begin{aligned} \dot{R}_b^a &= \frac{\mathrm{d}}{\mathrm{d}t} \left( \vec{A}^\mathrm{T} \cdot \vec{B} \right) \\ &= \dot{\vec{A}}{}^\mathrm{T} \cdot \vec{B} + \vec{A}^\mathrm{T} \cdot \dot{\vec{B}} \\ &= (\bm{\omega}_a^a \times)^\mathrm{T} \vec{A}^\mathrm{T} \cdot \vec{B} + \vec{A}^\mathrm{T} \cdot \vec{B} (\bm{\omega}_b^b \times) \\ &= -(\bm{\omega}_a^a \times) R_b^a + R_b^a \bm{\omega}_b^b \times \\ &= -R_b^a (\bm{\omega}_a^b \times) + R_b^a \bm{\omega}_b^b \times \\ &= R_b^a \bm{\omega}_{ab}^b \times \end{aligned} $$式中 $\bm{\omega}_{ab}^b = \bm{\omega}_b^b - \bm{\omega}_a^b$ 表示参考系之间的相对角速度在 $\vec{B}$ 参考系下的坐标。推导的倒数第二行使用了如下等式
$$ \bm{\omega}_a^b \times = \left( R_a^b \bm{\omega}_a^a \right) \times = R_a^b (\bm{\omega}_a^a \times) R_b^a $$该等式的简单证明可以从角速度叉乘 $\vec{\omega}_a \times \vec{\omega}_b$ 在两个参考系下的表达获得:
$$ \left\{\begin{aligned} \vec{\omega}_a \times \vec{\omega}_b &= \vec{A} \bm{\omega}_a^a \times \bm{\omega}_b^a = \vec{A} (\bm{\omega}_a^a \times) R_b^a \bm{\omega}_b^b \\ \vec{\omega}_a \times \vec{\omega}_b &= \vec{B} \bm{\omega}_a^b \times \bm{\omega}_b^b =\vec{A}R_b^a \bm{\omega}_a^b \times \bm{\omega}_b^b \end{aligned}\right. \\ \Downarrow \\ (\bm{\omega}_a^a \times) R_b^a = R_b^a \bm{\omega}_a^b \times \\ \Downarrow \\ \bm{\omega}_a^b \times = \left( R_a^b \bm{\omega}_a^a \right) \times = R_a^b (\bm{\omega}_a^a \times) R_b^a $$参考文献
- E. Canuto, C. Novara, D. Carlucci, C.P. Montenegro, L. Massotti, Spacecraft Dynamics and Control: The Embedded Model Control Approach, Butterworth-Heinemann, 2018.