现代控制理论(3):状态估计
现代控制讲究状态反馈,然而系统的状态不一定是直接测得的,这就需要用到本文介绍的状态估计器进行状态估计。
全维状态估计器
设线性时不变被控对象的状态空间表述为:
$$ \left\{ \begin{aligned} \dot{\bm{x}} &= A \bm{x} + Bu \\ y &= C \bm{x} \end{aligned} \right. $$据此,构建相同的理论模型:
$$ \left\{ \begin{aligned} \dot{\hat{\bm{x}}} &= A \hat{\bm{x}} + Bu \\ \hat{y} &= C \hat{\bm{x}} \end{aligned} \right. $$在该理论模型中,带帽子的变量(如 $\hat{x}$)表示估计值。由于是理论模型,其所有信息都可以通过计算机获得。理论模型和被控对象输入相同的 $u$ 时,原则上两者的响应相同,因而状态和输出都应当相同。然而实际上,由于被控对象和理论模型初始状态的偏差、理论模型的建模误差、被控对象的额外扰动、传感器的测量噪声等因素的影响,实际输出和理论输出并不相同,因而状态也不相同。
When in trouble, use feedback。为了解决模型之间的差异,遵循这个控制的金科玉律,对理论模型引入反馈进行矫正,令:
$$\bm{\dot{\hat{x}}} = A\hat{\bm{x}} + { B}u + {L}\left( {y - \hat y} \right)$$此时状态的估计误差 ${\bm{\tilde x}} = {\bm{x}} - {\bm{\hat{x}}}$ 满足:
$$\bm{\dot{\tilde{x}}} = \left( A - LC \right) \bm{\tilde{x}}$$于是,只要合理设计 $L$ 令 $\left( A - LC \right)$ 所有特征值的实部均小于零即可使状态估计误差收敛到零,即状态估计值趋近于真是状态。
状态估计器 $L$ 的设计与状态反馈 $K$ 的设计完全相同,考察数学关系:
$$ \left| {{A} - {LC}} \right| = \left| {{{\left( {{A} - {LC}} \right)}^T}} \right| = \left| {{{A}^T} - {{C}^T}{{L}^T}} \right| \leftarrow \left| A - BK \right| $$即:状态观测器与控制律之间存在对偶关系,设计时只需分别将 $A$ 、 $C$ 、$L$ 转置后采用与状态反馈相同的方法进行极点配置即可。
下面给出一个全维状态估计器的例子。
设弹簧-质量-阻尼系统的状态空间为:
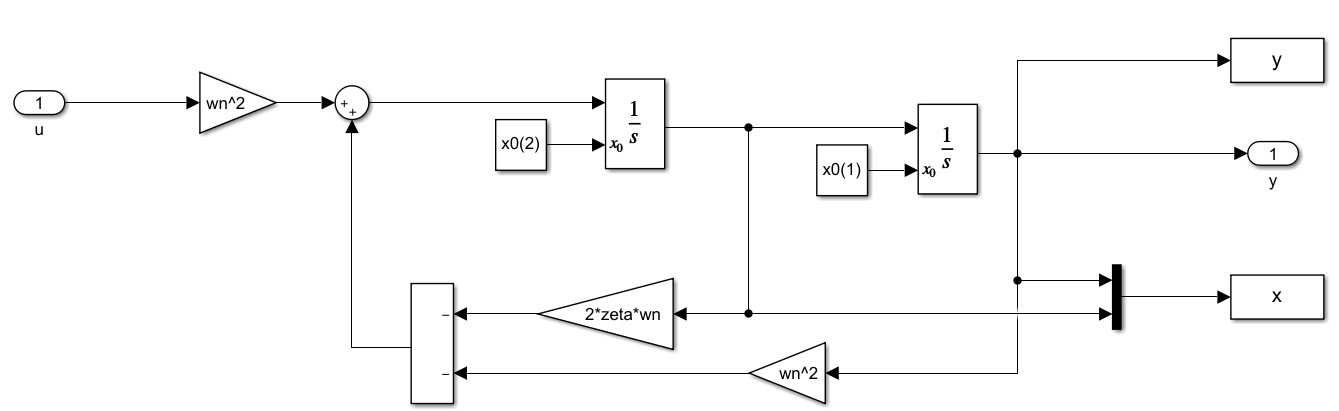
$$ \left\{ \begin{aligned} \dot{\bm{x}} &= \begin{bmatrix} 0 & 1 \\ -\omega_n^2 & -2\zeta \omega \end{bmatrix} \bm{x} + \begin{bmatrix} 0 \\ \omega_n^2 \end{bmatrix}u \\ y &= \begin{bmatrix} 1 & 0 \end{bmatrix}\bm{x}\ \end{aligned} \right. $$其中,$\omega_n=1 {\rm rad/s,}\, \zeta=0.3$,基于Simulink搭建被控对象如图所示
为了状态估计能够快速收敛,设的阻尼系数 $\zeta=0.7$ ,对应极点为 $-0.70\pm0.71j$ ,进而 $L=\left[0.80,, -0.48\right]$。带入仿真,观察状态的实际值和估计值如下图所示:
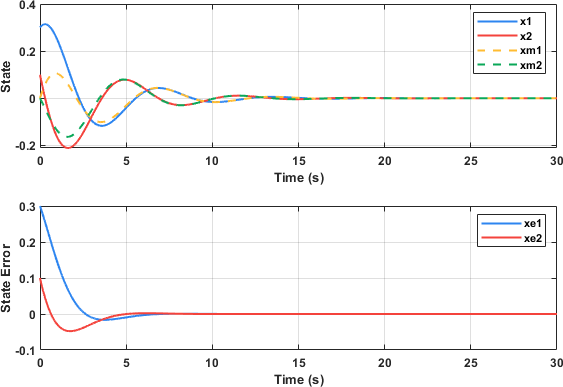
第一个子图实线为真实状态,虚线为状态估计值,可见两者在大约5s后趋于一致。第二个子图则表示两个状态的估计误差,同样可以反应状态估计值的误差随时间收敛到零,状态估计值趋于真实值。
降维状态估计器
上面介绍的状态估计器称之为全维状态估计器,因为它对系统的所有状态都进行了估计。然而,在一些情况下,系统的输出就是系统的某一个状态,能否直接利用这个状态,仅对其他状态进行估计呢?这时就需要用降维状态估计器。
以单输入单输出系统(SISO,Single Input Sigle Output)为例,将其状态空间方程拆解为:
$$ \left\{ \begin{array}{l} \begin{bmatrix} \dot{x}_a \\ \dot{\bm{x}}_b \end{bmatrix} = \begin{bmatrix} A_{aa} & A_{ab} \\ A_{ba} & A_{bb} \end{bmatrix}\begin{bmatrix} x_a \\ \bm{x}_b \end{bmatrix} +\begin{bmatrix} B_a \\B_b \end{bmatrix} u \\ y = \begin{bmatrix} 1&0 \end{bmatrix}\begin{bmatrix} x_a \\ \bm{x}_b \end{bmatrix} \end{array} \right. $$系统的输出就是状态量 $x_a$ ,需要进行估计的状态为 $\bm{x}_b$ 。
为了实现降维,需要对原始的状态空间方程进行改造,构造新的系统,使其状态变量有且仅有 $\bm{x}_b$ 。
首先从 $\dot{\bm{x}}_b$ 的方程中寻找新的系统输入方程:
$$\dot{\bm{x}}_b = {{A}_{bb}}{{\bm{x}}_b} + \left( {{A_{ba}}{x_a} + {{ B}_b}u} \right)$$将 $\dot{x}_a$ 换为输出的导数 $\dot{y}$ ,改写系统的输出方程:
$$\left( {\dot{y} - {A_{aa}}{x_a} - {B_a}u} \right) = {{A}_{ab}}{{\bm{x}}_b}$$由上面两个式子,对比标准的状态空间方程,显然有以下转换关系:
$$ \left\{ \begin{array}{l} {\bf{x}} \to {{\bf{x}}_b}\\ {A} \to {{A}_{bb}}\\ {B}u \to \left( {{A_{ba}}{x_a} + {{B}_b}u} \right)\\ C \to {{A}_{ab}}\\ y \to \left( {\dot y - {A_{aa}}{x_a} - {B_a}u} \right) \end{array} \right. $$根据全维状态估计器的设计方法,对这个转换后的"新系统"进行状态估计器设计,有
$$ \begin{aligned} \dot{\hat{\bm{x}}}_b &= {{A}_{bb}}{{{\bf{\hat x}}}_b} + \left( {{A_{ba}}{x_a} + {{B}_b}u} \right) + {{L}_b}\left[ {\left( {\dot y - {A_{aa}}{x_a} - {B_a}u} \right) - {{A}_{ab}}{{{\bf{\hat x}}}_b}} \right] \\ &= \left( {{{A}_{bb}} - {{L}_b}{{A}_{ab}}} \right){{{\bf{\hat x}}}_b} + \left( {{A_{ba}} - {{L}_b}{A_{aa}}} \right)y + \left( {{{B}_b} - {{L}_b}{B_a}} \right)u + {{L}_b}\dot y \end{aligned} $$由此初步完成了降维估计器的构造,设计的目标只需令 $A_{bb} - L_bA_{ab}$ 的所有特征值实部为负。需要注意的是,上式中包含输出的导数 $\dot{y}$,实际中微分是不容易实现的,且容易放大高频噪声,应当避免这一项的存在。于是需要进一步构造辅助变量 $\bm{x}_c = \bm{\hat x}_b - L_by$ ,则上式改为:
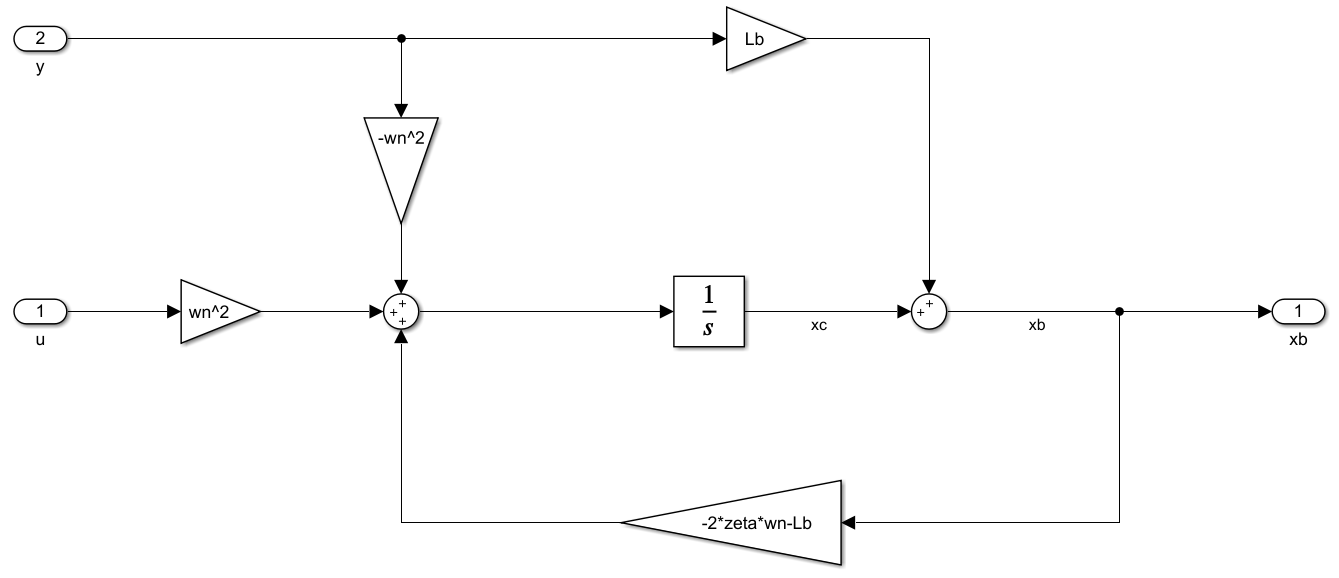
$$ \dot{\hat{\bm{x}}}_c = \left( {{{A}_{bb}} - {{L}_b}{{A}_{ab}}} \right)\left( {{{\bf{x}}_c} + {{L}_b}y} \right) + \left( {{A_{ba}} - {{L}_b}{A_{aa}}} \right)y + \left( {{{B}_b} - {{L}_b}{B_a}} \right)u $$至此,推导出降维状态估计器的可实现的形式。对于本文所提及的弹簧-质量-阻尼系统,其降维状态估计器结构如下图所示:
对降维状态估计器进行参数设计,之后得到该估计器的响应如图:
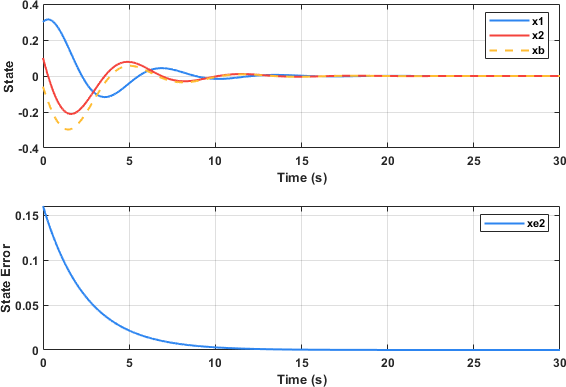
该降维状态估计器仅对状态量 $x_2$ 进行估计,可见在 8s 左右估计的误差已收敛到合适的范围,随着时间的增长,状态估计误差收敛于零,状态估计值收敛于真实值。
全维状态估计器还是降维状态估计器?这是一个开放性的问题,全维状态估计器的所有状态响应都有一定的收敛过程,而降维状态估计器利用系统输出作为已知状态,仅被估计的状态存在收敛过程,从这一方面看,降维状态估计器具有"更快"的效果;然而,降维估计器中对应于系统输出的状态容易受到传感器噪声的影响,而全维状态估计可以对噪声进行滤波,因而全维状态估计器具有"更低噪声"的效果。
参考文献
- G.F. Franklin, J. D. Powell, and A. Emami-Naeini, Feedback Control of Dynamic Systems, 7th ed. 2014.