MATLAB 符号计算
理工科研究经常会涉及到各种公式推导,其中又难免涉及变量多、形式复杂的公式。这时可以使用 MATLAB 的符号计算工具包辅助完成。本文对此工具包进行简要介绍。
定义符号变量
在进行符号计算之前,需要提前定义符号变量,这可以通过函数 sym 和 syms 来完成。其中 syms 常用来批量定义符号变量,例如下面的第一行代码就同时定义了 $x$ 、 $y$ 、$z$ 三个符号变量,各符号变量之间用空格分开。
syms x y z利用 syms 所定义的符号变量,其变量名与符号相同。若想为符号另外指定变量名,可采用 sym 的方式,如:
w0 = sym('omega_0');
rs1 = sym('r_i_s');
rs2 = sym('r_i__i_s');
Vprms = sym('V_p_rms');在声明符号名时(单引号里边的字符串),下划线可以看作特殊的分隔符。单个下划线后面的字符表示下标,这与LaTeX相似,并且可以多次采用单下划线对下标进行分割,这会在最后导出LaTeX代码时自动插入逗号。类似地,若想为符号名加上标,可以连用两个下划线,其后的字符表示上标。例如上面所定义的四个符号变量分别代表以下符号:
| 符号变量 | 符号名 |
|---|---|
| w0 | $\omega _{0}$ |
| rs1 | $r_{i,s}$ |
| rs2 | $r_{i,s}^{i}$ |
| Vprms | $V_{p,\mathrm{rms}}$ |
使用下划线为符号指定下标和上标时,上标或下标的声明顺序无关紧要,即无所谓先用连续下划线指定上标还是先用单下划线指定下标,甚至上下标交叉指定都不影响符号名。但分割指定多个上下标时,符号名下标的顺序与变量名声明时的顺序一致。例如上面 $r_{i,s}^{i}$ 的定义,下标先指定的是 $i$ ,因此符号名的下标中 $i$ 在前。这一点对一些表示相对关系的符号中至关重要。
除此之外, sym 还可以指定符号变量的维度,MATLAB会自动补充索引,如下:
r = sym('r',[1 3]); % r = [ r1, r2, r3 ]一般情况下,MATLAB会自动地将符号名末尾的数字标识为下标,但也可以在定义变量名时候可以特殊地用 %d 显式指定索引出现的位置,如
r1 = sym('r_%d',[1 3]); % 行向量,索引指定为下标
r2 = sym('r__%d',[1 3]); % 行向量,索引指定为上标
A = sym('A_%d__%d',[3 3]); % 矩阵,行列索引分别为下标和上标定义完符号变量后,我们还可以使用 assume 命令对变量进行约束,例如我们可以对符号变量 x 进行如下设置
| 约束条件 | 命令 |
|---|---|
| 实数 | assume(x,'real') |
| 有理数 | assume(x,'rational') |
| 正数 | assume(x,'positive') |
| 正整数 | assume(x,{'positive','integer'}) |
| 小于 -1 或大于 1 | assume(x<-1 | x>1) |
| 2~10 之间的整数 | assume(in(x,'integer') & x>2 & x<10) |
| 不是整数 | assume(~in(z,'integer')) |
| 不为零 | assume(x ~= 0) |
| 偶数 | assume(x/2,'integer') |
| 奇数 | assume((x-1)/2,'integer') |
| 大于 0 且小于 $2\pi$ | assume(x>0 & x<2*pi) |
| $\pi$ 的整数倍 | assume(x/pi,'integer') |
符号计算示例
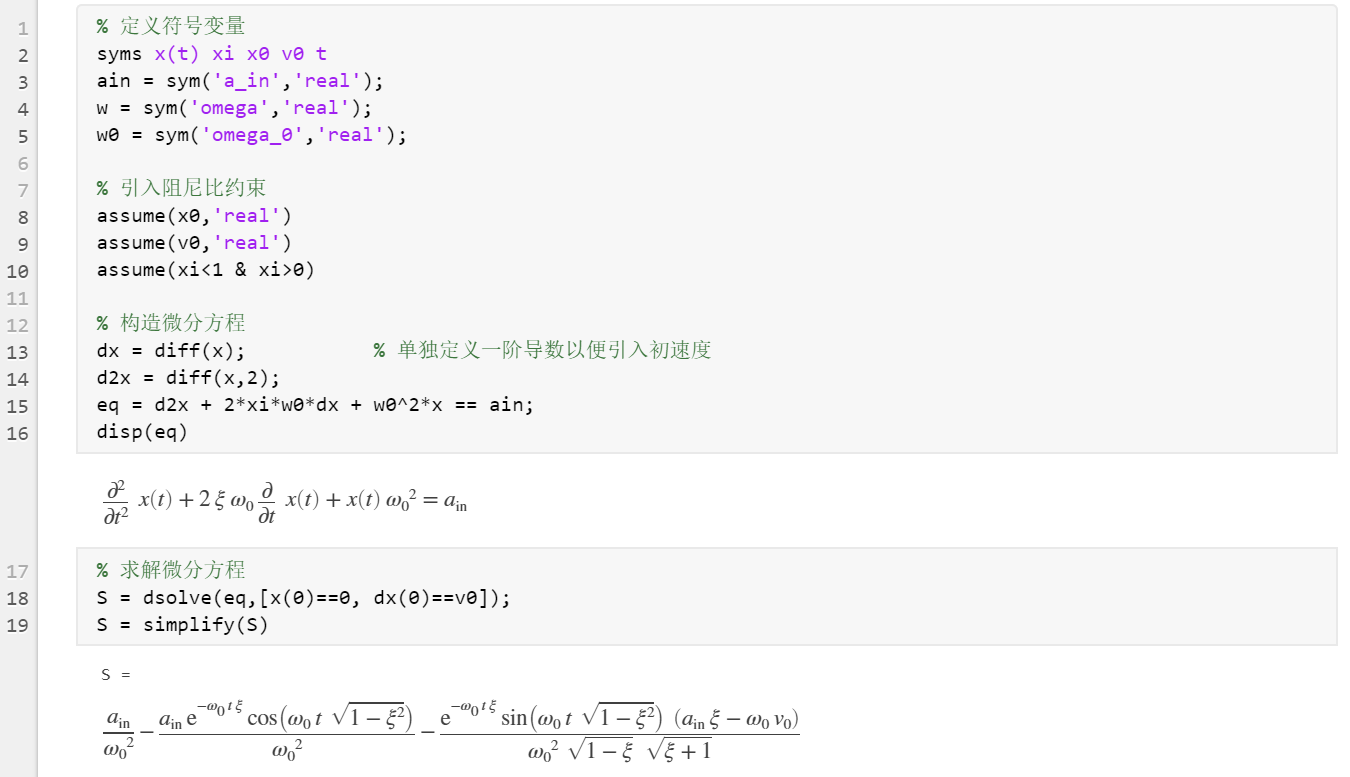
我们以计算微分方程为例展示符号计算的一般步骤。假设待求解的微分方程为弹簧-质量-阻尼系统动力学方程:
$$\ddot x + 2 \xi \omega_0 \dot x + \omega_0^2 = sin(\omega t)$$设初始位移为 $x_0$ ,初速度为 $v_0$ ,求解位移响应 $x(t)$ 。
我们可以采用以下代码:
% 定义符号变量
syms x(t) xi x0 v0 t
ain = sym('a_in','real'); % 定义变量的同时引入约束
w = sym('omega','real');
w0 = sym('omega_0','real');
% 引入阻尼比约束
assume(x0,'real')
assume(v0,'real')
assume(xi<1 & xi>0)
% 构造微分方程
dx = diff(x); % 需要单独定义一阶导数才能引入初速度约束
d2x = diff(x,2);
eq = d2x + 2*xi*w0*dx + w0^2*x == ain;
disp(eq)
% 求解微分方程
S = dsolve(eq,[x(0)==0, dx(0)==v0]);
S = simplify(S)最后解得
$$ \frac{a_{\mathrm{in}}}{{\omega _{0}}^2}-\frac{a_{\mathrm{in}}\,{\mathrm{e}}^{-\omega _{0}\,t\,\xi }\,\cos\left(\omega _{0}\,t\,\sqrt{1-\xi ^2}\right)}{{\omega _{0}}^2}-\frac{{\mathrm{e}}^{-\omega _{0}\,t\,\xi }\,\sin\left(\omega _{0}\,t\,\sqrt{1-\xi ^2}\right)\,\left(a_{\mathrm{in}}\,\xi -\omega _{0}\,v_{0}\right)}{{\omega _{0}}^2\,\sqrt{1-\xi }\,\sqrt{\xi +1}} $$输出计算结果
如果采用 MATLAB 的实时脚本运行上面的代码,MATLAB 将会自动将公式转化为 $\LaTeX$ 公式,如下图所示:
更一般地,我们更希望将计算结果转化为 $\LaTeX$ 代码,通过 MathType 或 $\LaTeX$ 整合到文档中,这时可以使用 latex ,如:
>> latex(S)
ans =
'\frac{a_{\mathrm{in}}}{{\omega _{0}}^2}-\frac{a_{\mathrm{in}}\,{\mathrm{e}}^{-\omega _{0}\,t\,\xi }\,\cos\left(\omega _{0}\,t\,\sqrt{1-\xi ^2}\right)}{{\omega _{0}}^2}-\frac{{\mathrm{e}}^{-\omega _{0}\,t\,\xi }\,\sin\left(\omega _{0}\,t\,\sqrt{1-\xi ^2}\right)\,\left(a_{\mathrm{in}}\,\xi -\omega _{0}\,v_{0}\right)}{{\omega _{0}}^2\,\sqrt{1-\xi }\,\sqrt{\xi +1}}'如果大家仔细观察MATLAB转换的LaTeX代码,会发现它对希腊字母进行了识别和转换,对字符串下标也进行了识别并利用 \mathrm{} 将其转化为正体。如果再仔细一些,自然对数的底 $\mathrm{e}$ 也是正体。可见MATLAB对这种细节的处理非常到位。
生成的代码较长时,可以使用 clipboard 命令将结果直接复制到系统剪切板中:
texCode = latex(S);
clipboard('copy',texCode)