使用反步法设计非线性控制器
反步法(Backstepping)通过拼凑李雅普诺夫函数得到控制律,可用于非线性被控对象的控制器设计。本文是对 DR_CAN 系列视频的学习,并以一个开环不稳定的非线性系统为例进行设计与仿真。
反步法基本思路
为了使用李雅普诺夫函数判定系统稳定性,首先做如下定义:
对于标量函数 $V(\bm{x})$,若有
- $V(\bm{x}) = 0, \ \bm{x}=0$
- $V(\bm{x}) > 0,\ \bm{x}\ne 0$
则称 $V(\bm{x})$ 为正定函数。如果 $\bm{x}\ne 0$ 时 $V(x)\ge 0$,则称之为半正定函数。类似地,如果 $\bm{x}\ne 0$ 时 $V(x) < 0$ 则将其称为负定函数;如果 $V(x) \le 0$ 则为半负定函数。
非线性系统的稳定性可以通过李雅普诺夫直接法进行判定:如果一个关于所有状态的函数 $V(\bm{x})$ 是正定的,其导数 $\dot{V}(\bm{x})$ 为半负定的,则该函数为李雅普诺夫函数,且对应的系统稳定。进一步,如果 $\dot{V}(\bm{x})$ 是负定的,则系统渐进稳定。
反步法的基本思路是逐级构造关于误差的正定函数,通过误差动态模型将该正定函数的导数凑成负定函数,从而获得控制律的具体表达,使系统满足稳定性需求。
示例与公式推导
假设现有非线性负刚度弹簧系统,其状态空间方程表述为
$$ \left\{ \begin{aligned} \dot{x} &= v \\ \dot{v} &= a x^2 + u \end{aligned} \right. $$其中 $u$ 为控制命令。设控制的目标是使位移 $x$ 跟随参考位移 $x_r$,不失一般性地,控制指令应当是状态和参考的函数,即 $u=f(x,v,x_r)$。反步法的目标就是设计非线性控制律 $f(\cdot)$ 来实现参考信号的跟随。需要说明的是,参考信号可以通过多种手段给出,因此 $x_r$ 及其导数均可以认为是已知的,可直接用于构成控制律。
控制器设计以误差收敛为目标,首先定义位移跟踪误差,并构造第一级李雅普诺夫函数
$$ \left\{ \begin{aligned} e_1 &= x - x_r \\ V_1 &= \frac{1}{2} e_1^2 > 0, \quad (e_1 \ne 0) \end{aligned} \right. $$$V_1$ 在 $e_1\ne 0$ 时均为正值,即为正定的。$e_1$ 渐进稳定的条件是 $\dot{V}_1$ 是负定,考虑
$$ \dot{V}_1 = e_1 \dot{e}_1 = e_1 \left( v - \dot{x}_r \right) $$为了将上式凑成负定函数,可以让 $v-\dot{x}_r = -K_1 e_1$,将该需求进一步分解为使速度的跟踪误差收敛:
$$ v - \dot{x}_r = -K_1 e_1 \rightarrow \left\{ \begin{aligned} v_r &= \dot{x}_r - K_1 e_1 \\ e_2 &= v-v_r = 0 \end{aligned} \right. $$此时将需求从一个误差收敛扩展到了两个误差收敛,相应的李雅普诺夫函数可选取为
$$ V = \frac{1}{2} e_1^2 + \frac{1}{2}e_2^2 $$显然它是正定的。再次考虑其导数
$$ \begin{aligned} \dot{V} &= e_1 \dot{e}_1 + e_2 \left( ax^2 + u - \left( \ddot{x}_r - K_1 \dot{e}_1 \right) \right) \\ &= e_1 \left( v - \dot{x}_r \right) + e_2 \left( ax^2 + u -\ddot{x}_r + K_1 \left( v-\dot{x}r \right) \right) \\ &= e_1 \left(-K_1 e_1 + e_2 \right) + e_2 \left( ax^2 + u -\ddot{x}_r + K_1 \left( v-\dot{x}_r \right) \right) \\ &= -K_1 e_1^2 + e_2 \left( e_1 + ax^2 + u -\ddot{x}_r + K_1 \left( v-\dot{x}_r \right) \right) \end{aligned} $$注意,在第三行我们只将第一项的 $\dot{e}_1$ 进行了替换: $\dot{e}_1 = v-\dot{x}_r = v_r + e_2 - \dot{x}_r = -K_1e_1 + e_2$ ,这是第一次凑李雅普诺夫函数的期望;而第二项没有作此替换,是为了第二次凑负定函数。也就是说,反步法是逐级将函数凑成负定形式。显然,如果希望 $\dot{V}$ 是负定的,可以使
$$ e_1 + ax^2 + u -\ddot{x}_r + K_1 \left( v-\dot{x}_r \right) = -K_2 e_2 $$由此可以解得控制律为
$$ \begin{aligned} u &= -ax^2 + \ddot{x}_r - e_1 -K_1 \left( v - \dot{x}_r \right) - K_2 e_2 \\ &= -ax^2 + \ddot{x}_r - \left( x-x_r \right) -K_1 \left( v - \dot{x}_r \right) - K_2 \left( v - \dot{x}_r + K_1 \left( x - x_r \right) \right) \\ &= -ax^2 + \ddot{x}_r - G_1 \left( x-x_r \right) - G_2 \left( v-\dot{x}_r \right) \end{aligned} $$其中 $G_1 = 1 + K_1K_2,, G_2 = K_1 + K_2$ 将控制律写成了一般形式的状态(误差)反馈。非线性控制律由三部分构成:
- 非线性动态:利用 $-ax^2$ 将模型中的非线性偶和扣除,从而达到将模型线性化的目的,是反馈显性化的重要组成;
- 参考指令:$\ddot{x}_r$ 实际上是“开环控制”的指令,作为先验知识驱动被控对象跟随参考信号;
- 误差反馈:将状态与参考信号的误差进行反馈,是误差环路稳定的基本要素,可以通过调整控制参数调节误差的收敛动态。
最后,将误差的动态重新整理,可得
$$ \left\{ \begin{aligned} \dot{e}_1 & = -K_1e_1 + e_2 \\ \dot{e}_2 & = -e_1 - K_2e_2 \end{aligned} \right. $$可见,非线性被控对象通过反馈,使得误差的动态为线性模型,称之为反馈线性化。误差动态的极点由以下方程给出
$$ \begin{vmatrix} -K_1-\lambda & 1 \\ -1 & -K_2-\lambda \end{vmatrix} = \lambda^2 + \left( K_1+K_2 \right) \lambda + K_1K_2+1 = 0 $$设极点配置为 $p_1,,p_2$,相应的特征方程为
$$ \left( \lambda - p_1 \right) \left( \lambda - p_2 \right) = \lambda^2 - \left( p_1 + p_2 \right) \lambda + p_1 p_2 = 0 $$对比以上两个式子可得
$$ \left\{ \begin{aligned} & K_1 + K_2 = - \left( p_1 + p_2 \right) \\ & K_1K_2 +1 = p_1p_2 \end{aligned} \right. \quad \Rightarrow \quad K_{1,2} = \frac{-\left( p_1+p_2 \right)\pm\sqrt{\left( p_1 - p_2 \right)^2+4}}{2} $$仿真建模与验证
利用 Simulink 可以很容易验证上面的设计结果,仿真模型如下图所示:
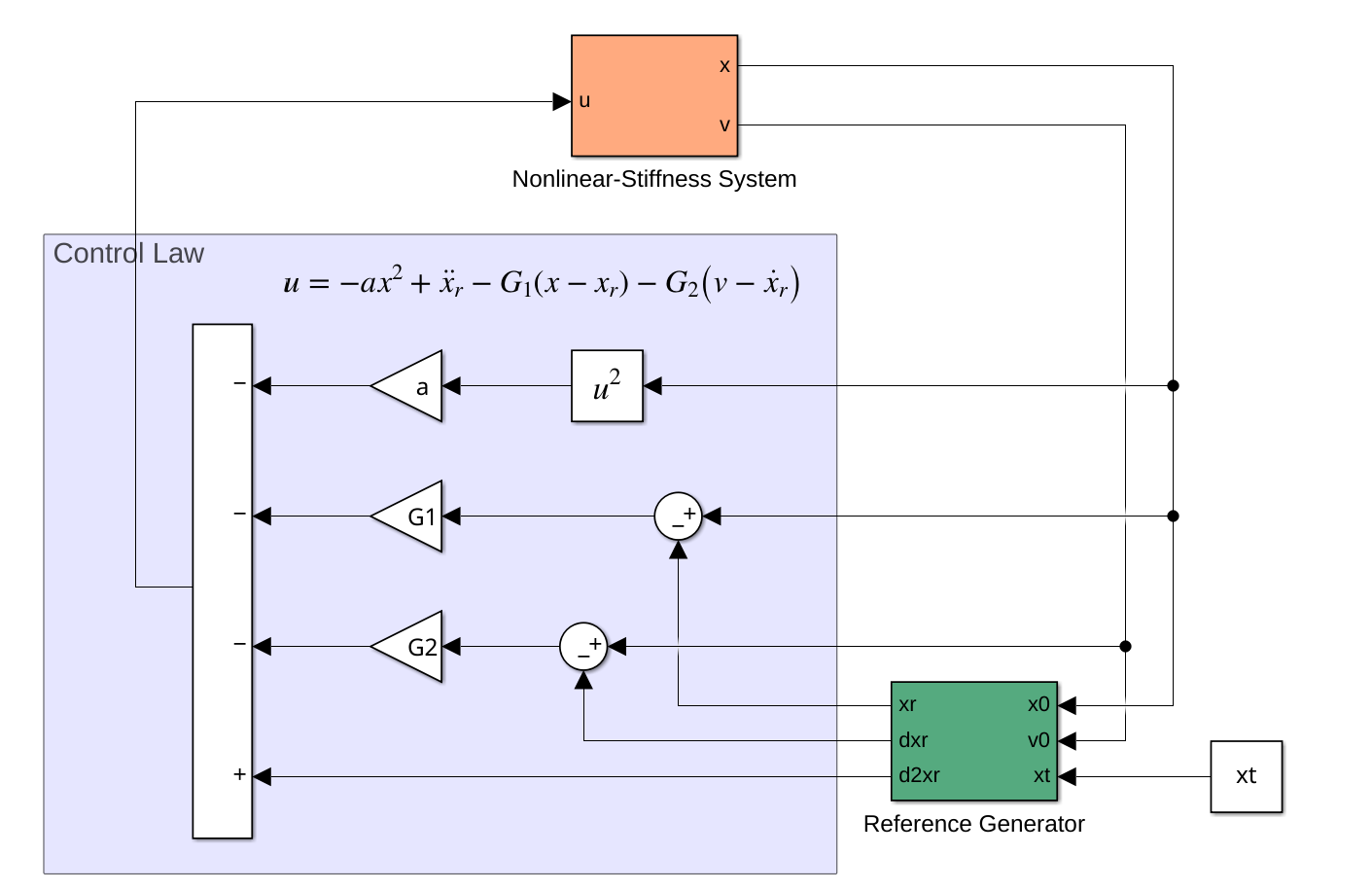
为了验证控制律,假设系统是理想的,即没有外部扰动和测量噪声、所有状态都精确可知。在实际情况下应当引入相应的噪声模型,并通过状态估计器对状态进行估计。
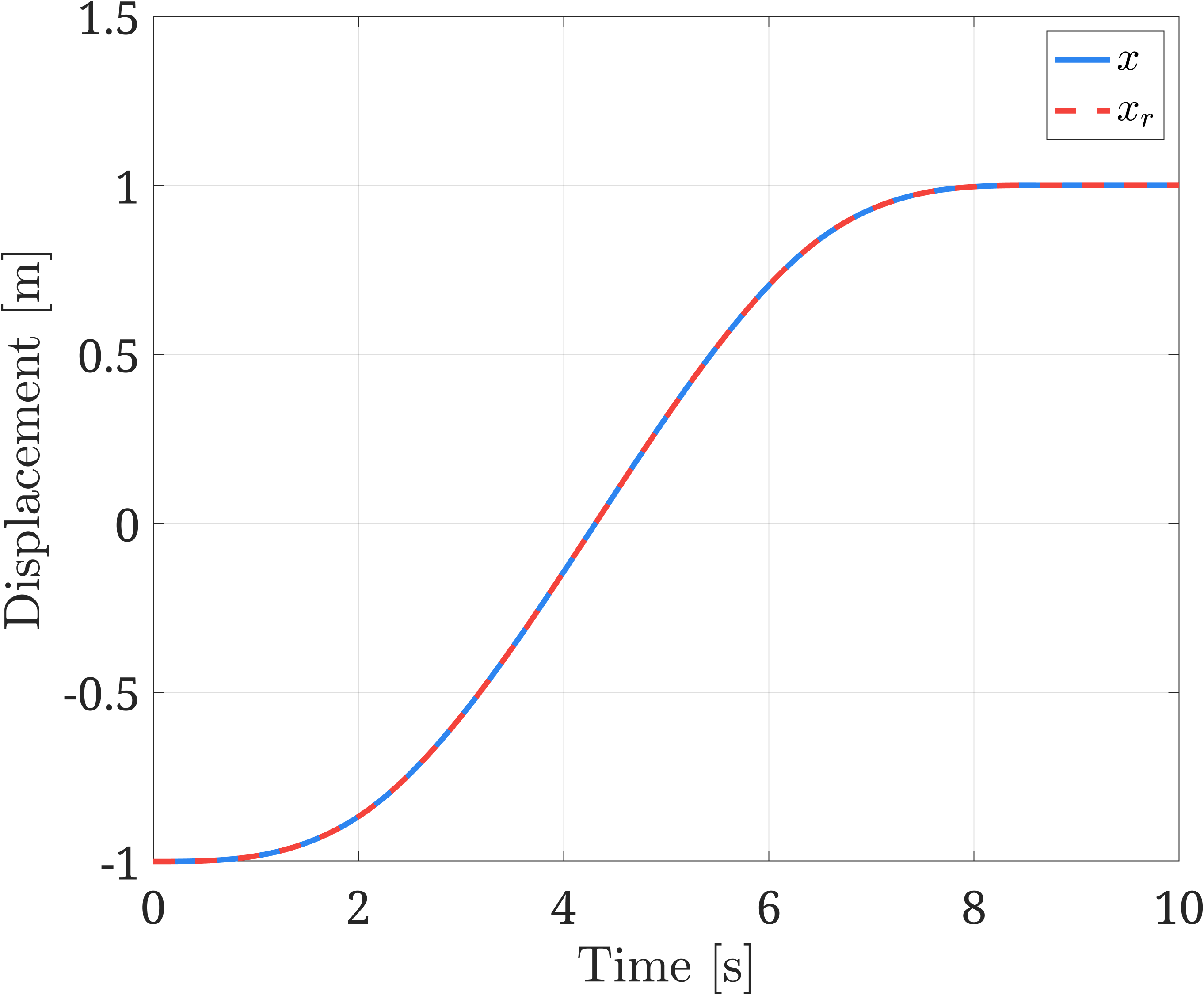
假设被控对象的初始位置与目标位置不同,利用该控制器将其控制到目标位置。在本例中,参考发生器使用三阶砰砰控制以对参考信号进行的微分,以使过渡过程光滑无超调。最终被控对象的位移响应如下图所示:
上述仿真模型我分享在了 GitHub 仓库,欢迎克隆、讨论、分享。
参考文献
- DR_CAN, Nonlinear Backstepping Control.